Non-Overlapped Stereo Imaging for Virtual Reality Headset Tracking
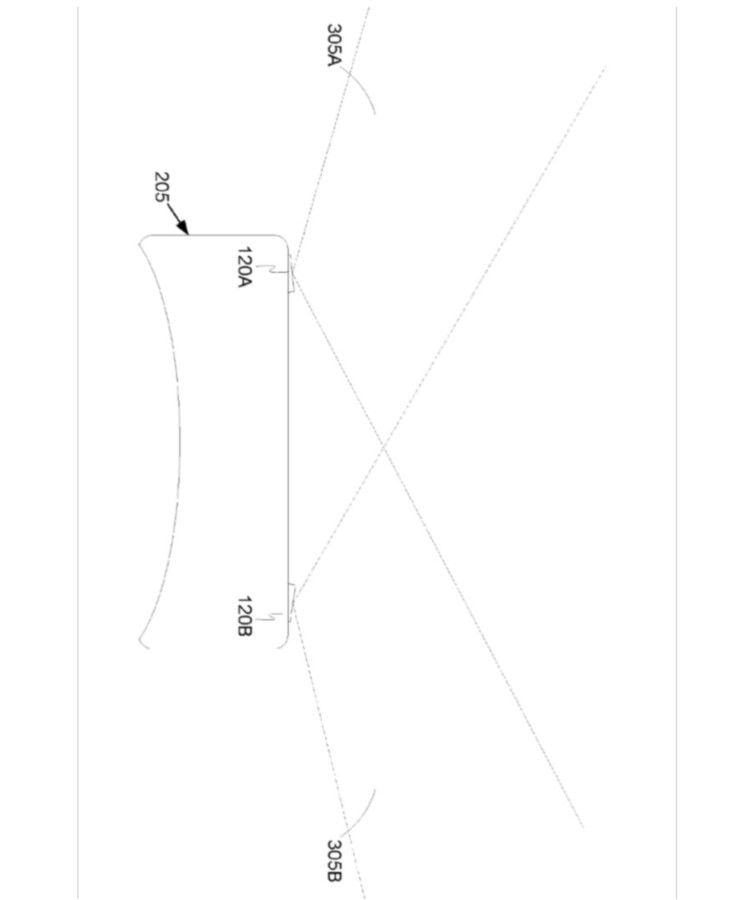
A virtual reality (VR) headset includes a first camera and a second camera capturing image data of an environment of the VR headset. Each camera has a field of view, and a portion of the fields of view of the first and second cameras overlap while a portion of the fields of view do not overlap. A processor receiving the image data from the first and second cameras is configured to identify a first observation of a position of the VR headset in the environment and positions of a plurality of features based on the image data captured by the first camera. The processor also identifies a second observation of the position of the VR headset in the environment and the positions of the features based on the image data captured by the second camera. Based on the first and second observations, the processor determines a model of the environment.