Calibration of multiple rigid bodies in a virtual reality system
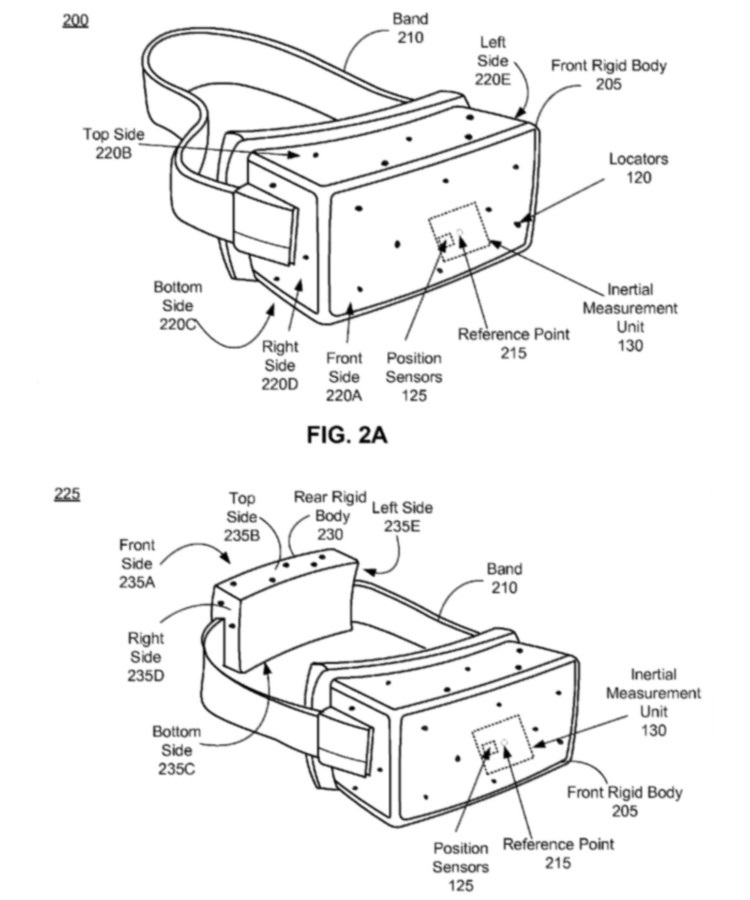
A virtual reality (VR) console receives slow calibration data from an imaging device and fast calibration data from an inertial measurement unit on a VR headset including a front and a rear rigid body. The slow calibration data includes an image where only the locators on the rear rigid body are visible. An observed position is determined from the slow calibration data and a predicted position is determined from the fast calibration data. If a difference between the observed position and the predicted position is greater than a threshold value, the predicted position is adjusted by a temporary offset until the difference is less than the threshold value. The offset is removed by re-calibrating the rear rigid body to the front rigid body once locators on both the front and rear rigid body are visible in an image in the slow calibration data.