Rolling Shutter Blur Reduction using Motion Data
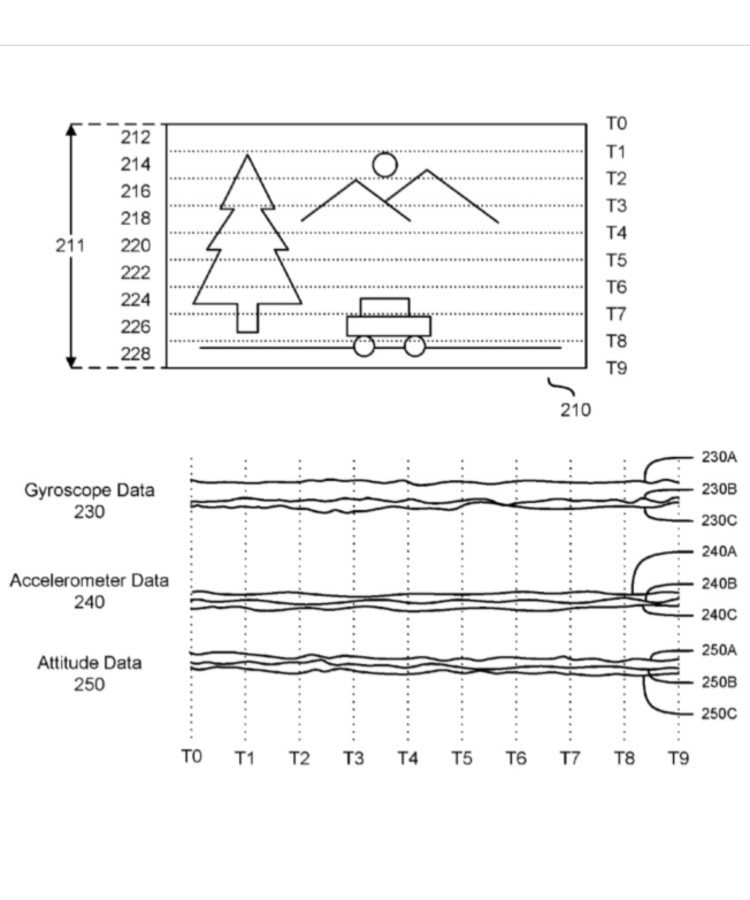
Embodiments relate to adjusting an image frame based on motion sensor data. An image frame including image data for a plurality of rows of the image frame is captured sequentially row-by-row. Motion sensor data corresponding to the image frame is also captured. Motion vectors describing motion between each row of the image frame are determined based on the motion sensor data. An image data translation is calculated for each row of image frame based on the motion vector for the row. The image frame is adjusted based on the image data translation for each row of the image frame to generate an adjusted image frame.